Zebulon i Zebulon 2.0
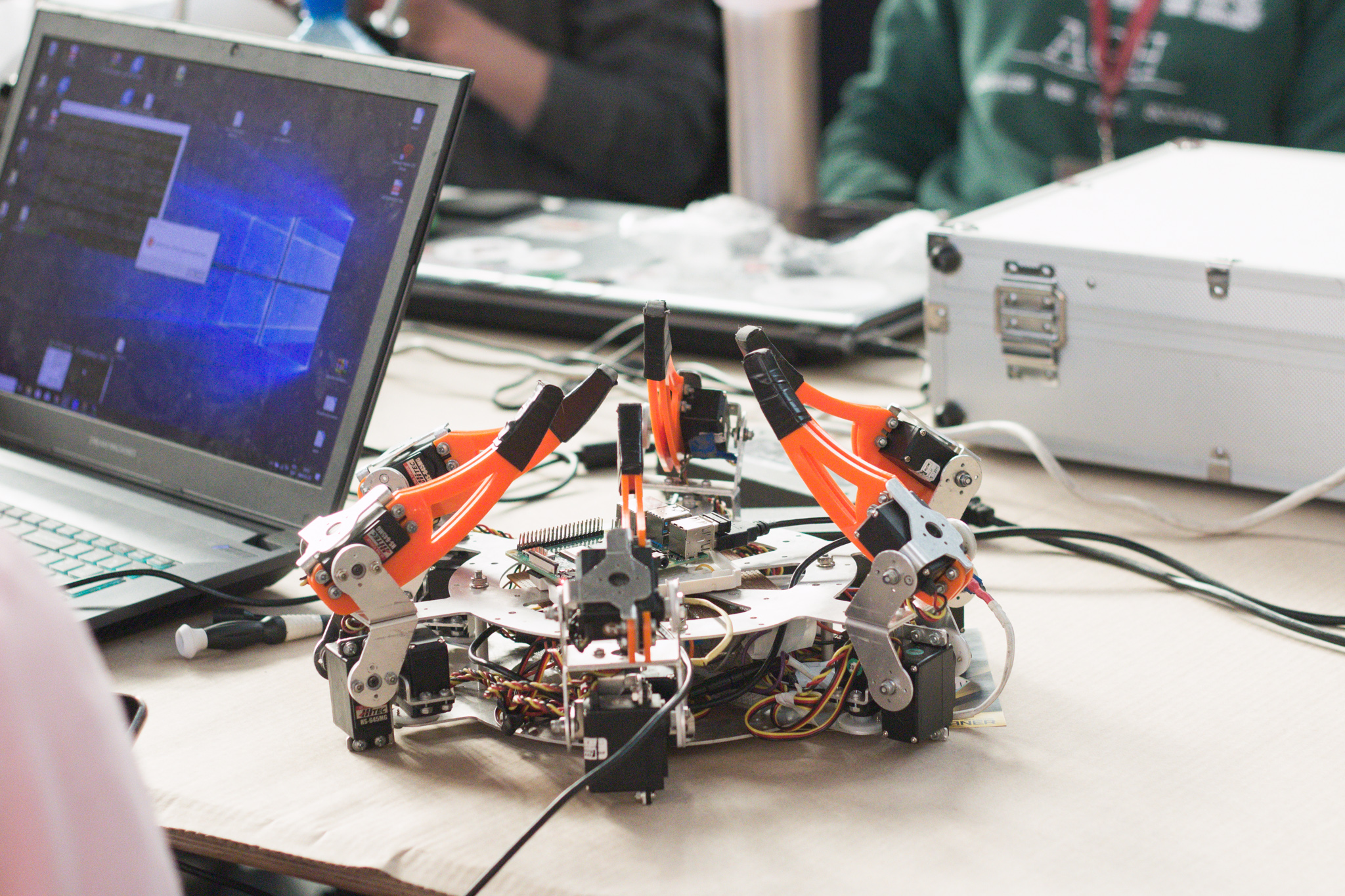
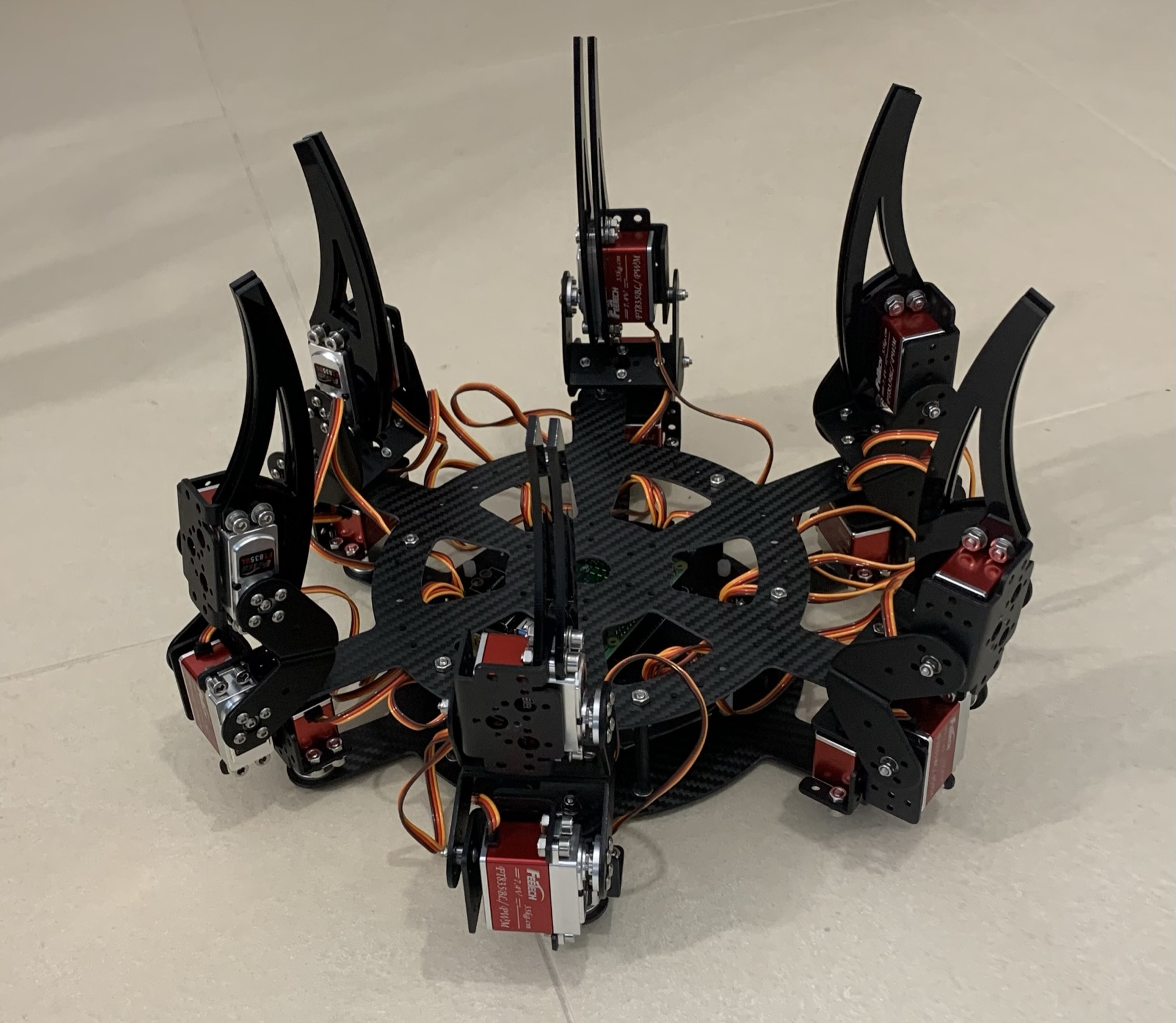
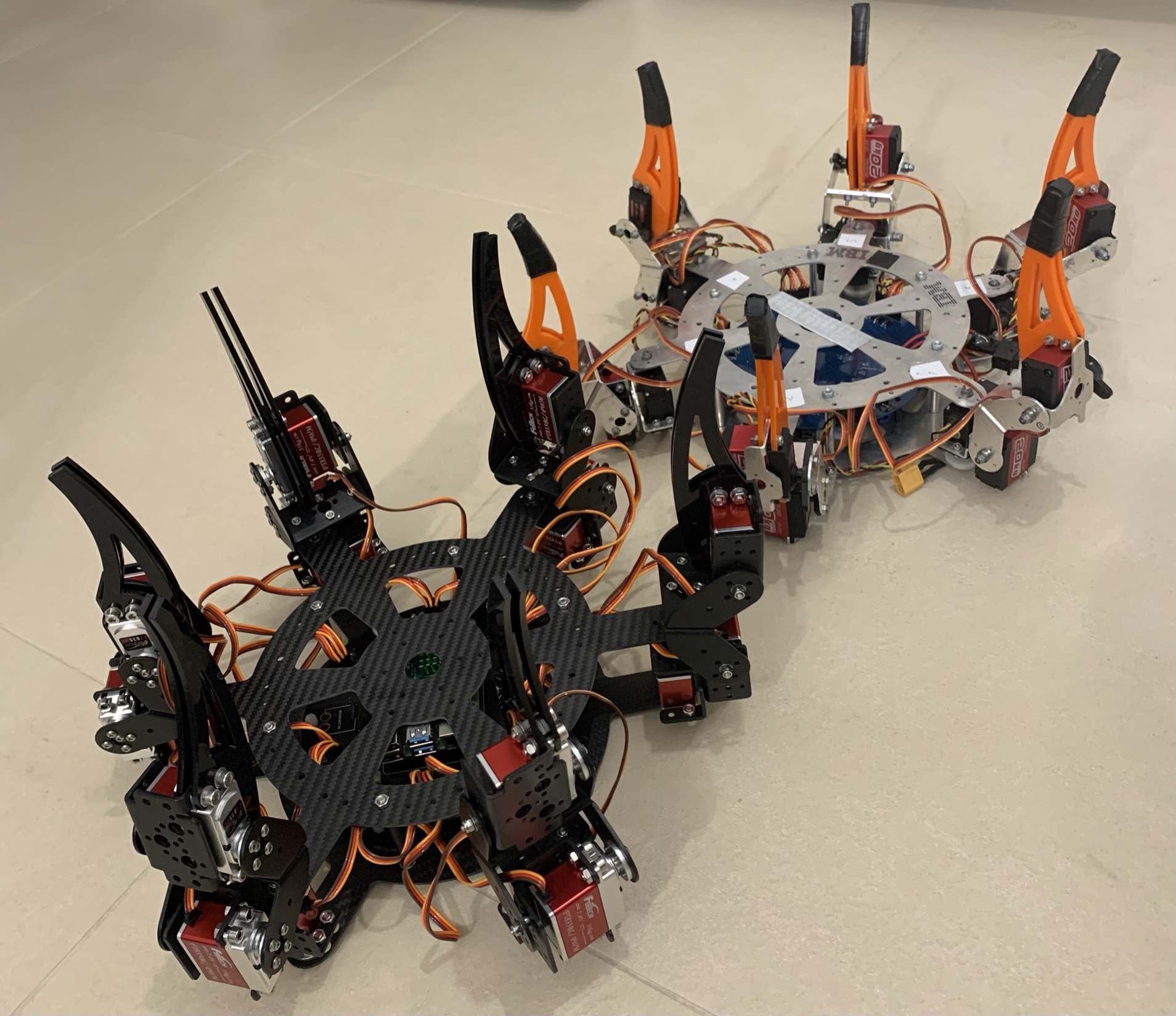
Zebulon i Zebulon 2.0 to dwie generacje robotów kroczących typu środkowo-symetryczny hexapod. Obie konstrukcje są oparte na Raspberry Pi i napisane w języku Python 3.
Historia robota Zebulon zaczęła się lata temu, jako praca dyplomowa. Od tamtej pory projekt przechodził przez wiele faz i zmian, był kilkukrotnie zawieszany i wznawiany, aby po podpisaniu współpracy z firmą IBM, osiągnąć swoją ostateczną formę w 2021 roku. Stał się wtedy wzorcem dla nowej konstrukcji, Zebulona 2.0, na którym od tamtej pory jest skupiona uwaga zespołu. Zebulon 2.0 był zupełnym refactoringiem starej konstrukcji, zarówno pod względem elektroniki, mechaniki jak i oprogramowania, jednakże kształt i ogólna idea stojąca za robotem pozostały takie same.
Obecnie Zebulon 2.0 mierzy około 50cm średnicy, jest wykonany w większości z włókna węglowego, a całość elektroniki umieszczona jest na dedykowanej płytce PCB. "Mózgiem" robota jest Raspberry Pi 4B a 18 serwomechanizmów Feetech FT835BL jest napędzanych przez sterownik Pololu Maestro. Całość kodu jest natomiast napisana w języku Python 3.
Obecni członkowie
- Koordynator: Jakub Mazur
- Maciej Baczmański
- Balbina Molerus
- Jakub Sikora
- Krzysztof Niedziela
- Mateusz Szynal
- Sebastian Soczawa
Członkowie honorowi
- Katarzyna Sadowy
Nagrody
| Rok | Lista nagród |
|---|---|
| 2023 |
|
| 2022 |
|
| 2021 |
|